|
Junjun Xie I'm now a Ph.D. student at Harbin Institute of Technology, Shenzhen, where I received my Bachelor's degree in 2023. My research is about constrained optimization and learning for robot safety. I have a strong interest in robotics, control theory, and machine learning, and I'm always looking for new opportunities to collaborate and learn from others in these fields. |

|
Publications* indicates equal contribution. |
|
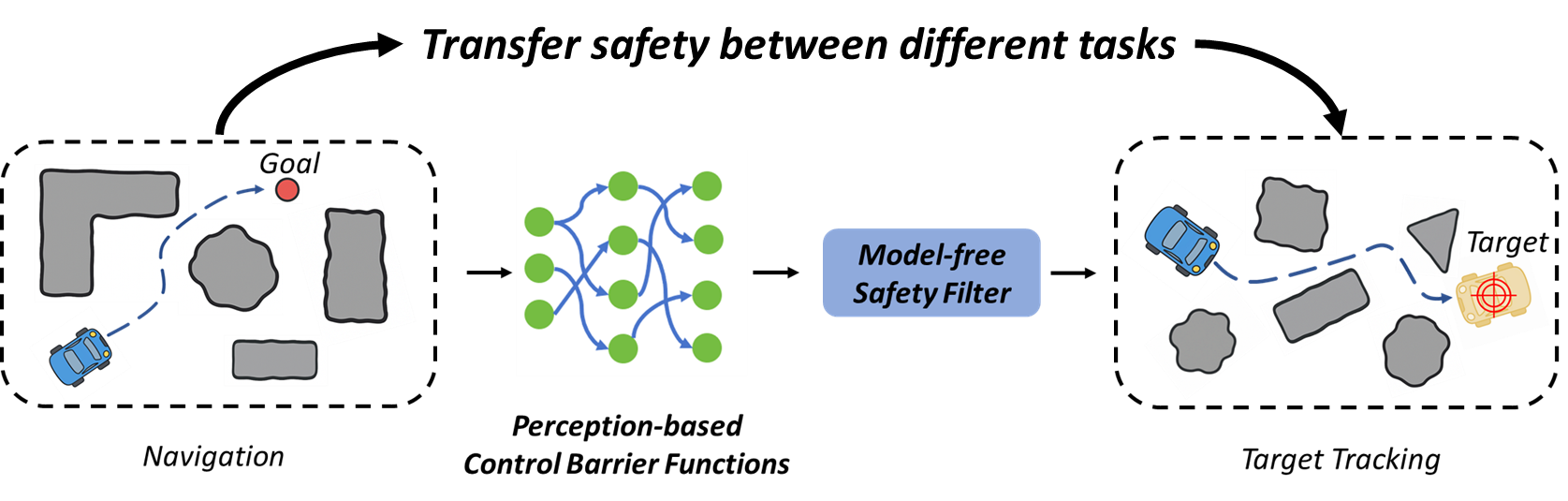
Transfer Your Safety: Learning Transferable Model-Free Safety Filters from a Single Policy to Enhance Safety Across Diverse Tasks
Junjun Xie*, Siru Li*, Shuhao Zhao, Xiaochen Xie, Liang Hu 2026 IEEE International Conference on Robotics and Automation (ICRA) Video Code
|
|
CBF-Based Hierarchical Quadratic Programs With Guaranteed Feasibility for Safety-Critical Systems
Junjun Xie, Liang Hu, Yunzhe Tan, Jun Yang IEEE Transactions on Automation Science and Engineering, 2025 citations Video Code
|

|
Flexible and Safe Navigation of Autonomous Underwater Vehicles with Input-Dynamics Move Blocking
Yujie Tang, Zilu Wang, Junjun Xie, Liang Hu Ocean Engineering, 2025 citations Code
|
|
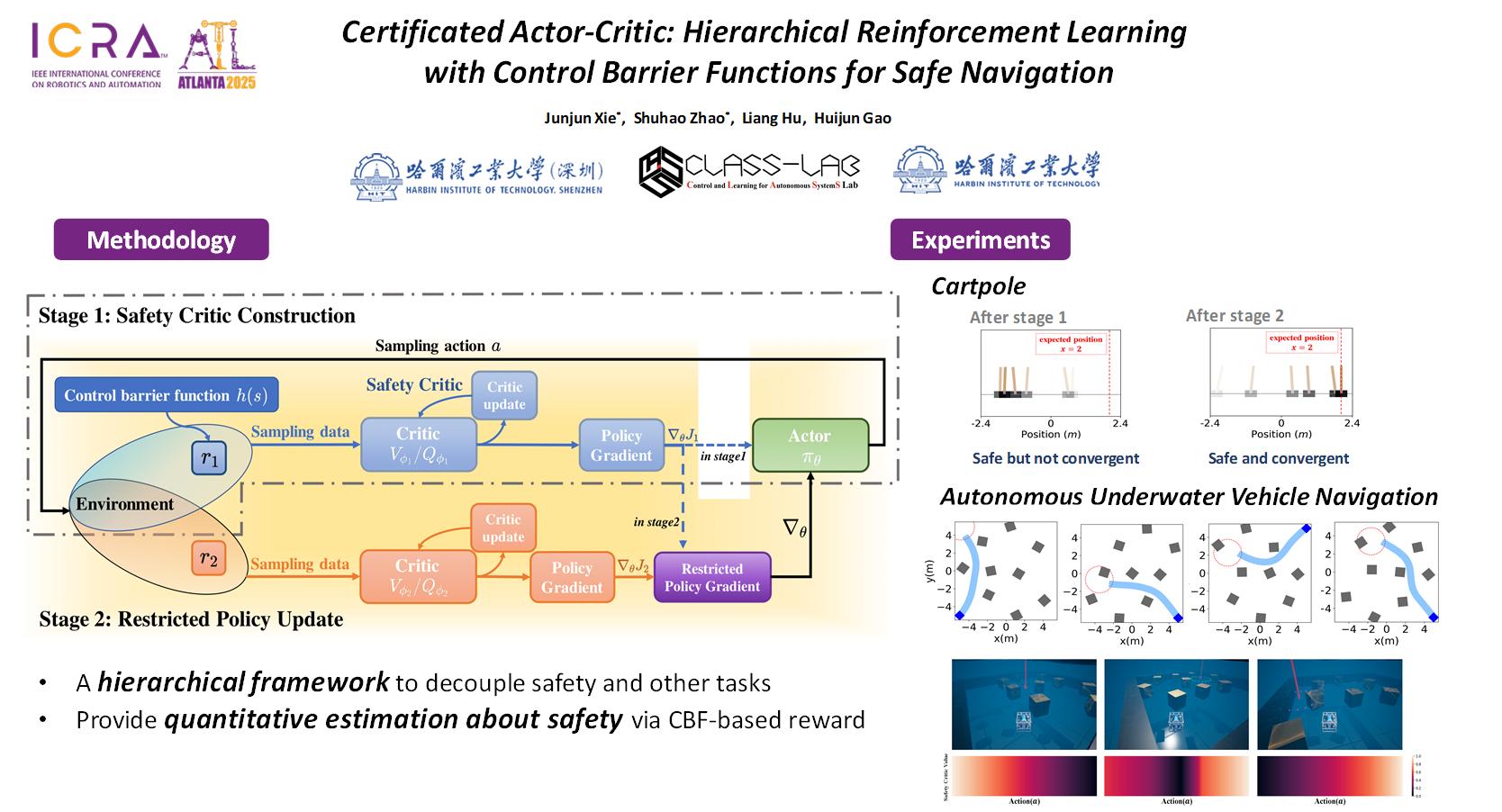
Certificated Actor-Critic: Hierarchical Reinforcement Learning with Control Barrier Functions for Safe Navigation
Junjun Xie*, Shuhao Zhao*, Liang Hu, Huijun Gao 2025 IEEE International Conference on Robotics and Automation (ICRA) citations Video Code
|
Academic Service |
|
Reviewer for:
|
|
Thanks Jonathan T. Barron for the website template. |